Minimum Path Cover in Parameterized Linear Time
Nov 17, 2022·
 ,
,
,
,
·
0 min read
,
,
,
,
·
0 min read
Manuel Cáceres
Massimo Cairo
Brendan Mumey
Romeo Rizzi
Alexandru I. Tomescu
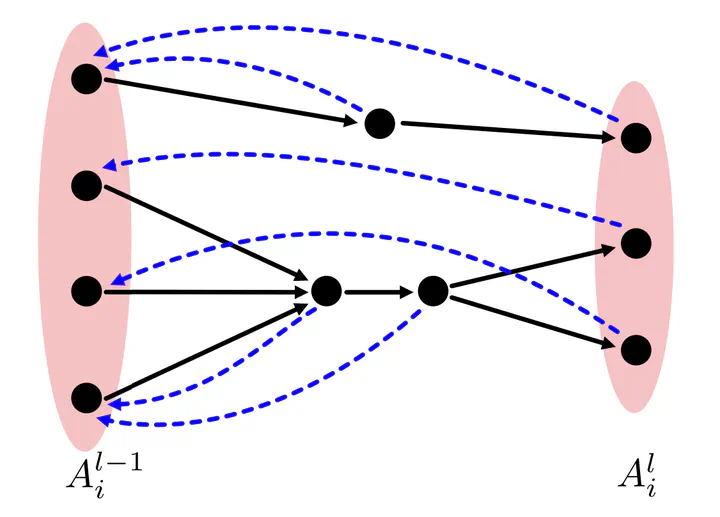 Back links point to antichain vertices in the same path
Back links point to antichain vertices in the same path
Abstract
A minimum path cover (MPC) of a directed acyclic graph (DAG) $G = (V,E)$ is a minimum-size set of paths that together cover all the vertices of the DAG. Computing an MPC is a basic polynomial problem, dating back to Dilworth’s and Fulkerson’s results in the 1950s. Since the size $k$ of an MPC (also known as the width) can be small in practical applications, research has also studied algorithms whose running time is parameterized on $k$. We obtain a new MPC parameterized algorithm for DAGs running in time $O(k^2|V| + |E|)$. Our algorithm is the first solving the problem in parameterized linear time. Additionally, we obtain an edge sparsification algorithm preserving the width of a DAG but reducing $|E|$ to less than $2|V|$. This algorithm runs in time $O(k^2|V|)$ and requires an MPC of a DAG as input, thus its total running time is the same as the running time of our MPC algorithm.
Type
Publication
In arXiv